Sensores de presença ou movimento, conhecidos como sensores IR (infravermelho) ou PIR (Passive Infrared Sensor ou Pyroelectric Infrared Sensor), são sensores que detectam radiação emitida pelo corpo humano, por exemplo.
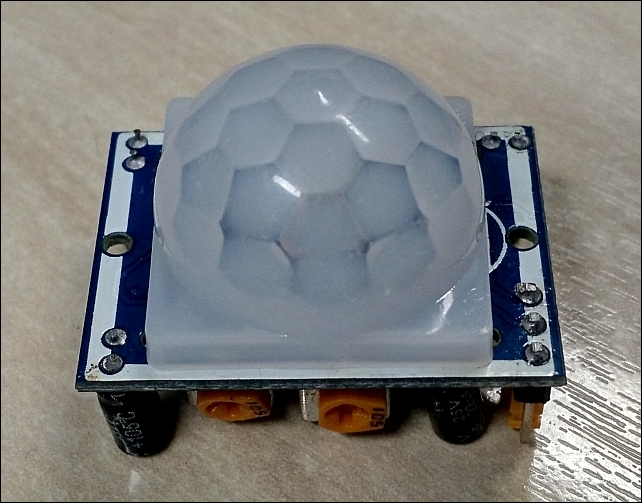
O elemento sensor é vedado e oferece grande imunidade a umidade e temperatura e sua área exposta deixa passar somente radiação infravermelha. O circuito ao redor dá suporte a leitura do sensor e posterior conversão em um sinal digital. Portanto, na saída deste sensor teremos um nível alto, quando da detecção do movimento e um nível baixo em estado de repouso.
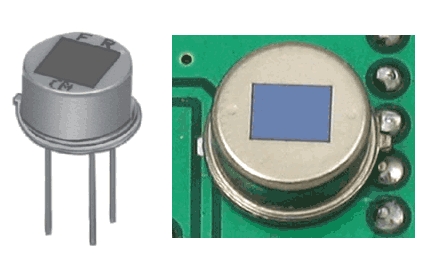
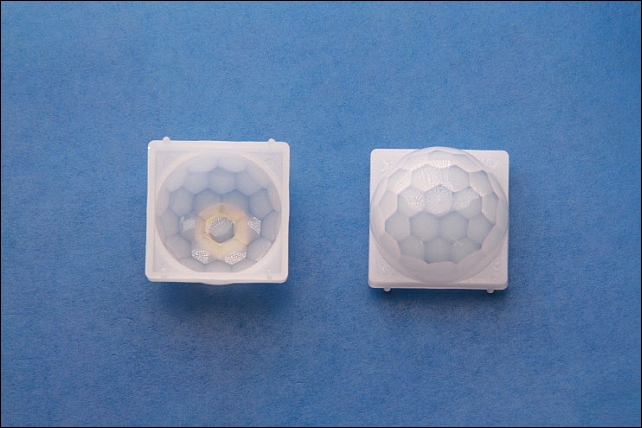
A lente (que cobre o elemento sensor) é do tipo Fresnel, feita de plástico, cuja função é ampliar o ângulo de detecção e concentração dos raios infravermelhos.
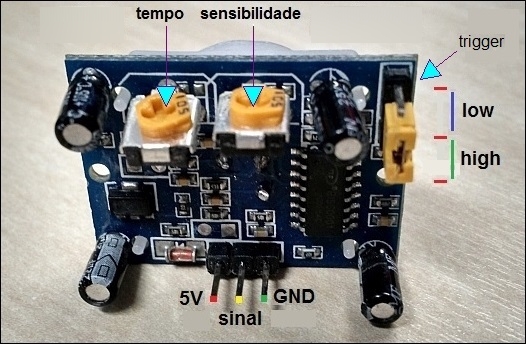
Pinos e Ajustes
Não é crítico mas requer um pouco de tempo para ajustar as suas necessidades.
Pinos:
- 5V = ligar no pino 5V da placa Arduino
- sinal = ligar em qualquer pino digital da placa Arduino
- GND = ligar no pino GND da placa Arduino
Ajustes:
-
-
- tempo (trimpot) = no sentido horário, aumenta o delay (tempo que o sinal ficará em nível alto) para aproximadamente 5 minutos e no sentido anti-horário para aproximadamente 5 segundos.
- sensibilidade (trimpot) = no sentido horário, aumenta a distância de detecção para aproximadamente 7 metros e no sentido contrário para aproximadamente 3 metros.
- trigger (jumper)
low – não repetitivo: quando alguém é detectado, um nível alto ficará presente no pino digital até que o tempo se esgote, daí o nível muda para baixo por aproximadamente 3 segundos, não aceitando novas detecções neste período.
high – repetitivo: quando em nível alto, ficará neste estado enquanto o sensor detectar alguém no ambiente (dentro do tempo ajustado, porém o tempo será renovado a cada detecção) até que não haja movimento, daí alterando o nível para baixo por aproximadamente 3 segundos, não aceitando novas detecções neste período.
-
Um pouco confuso, não? 🙂 A melhor forma de entender estes ajustes é fazer experiências com a montagem sugerida mais adiante.
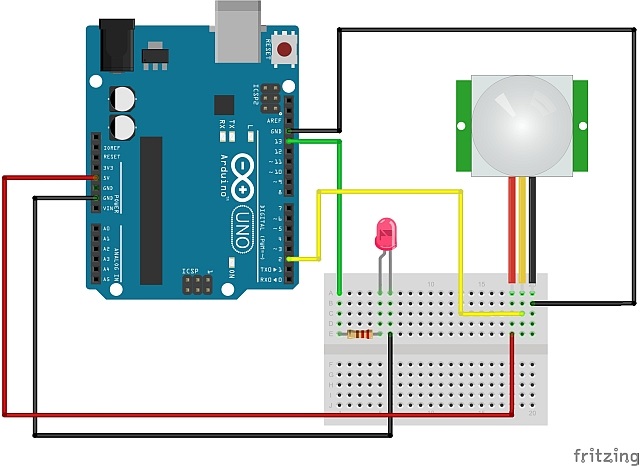
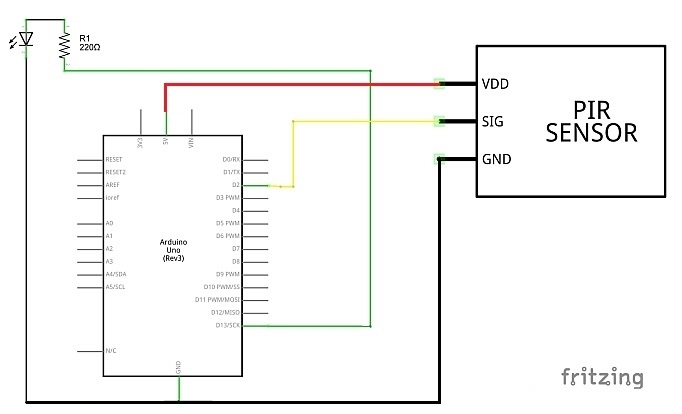
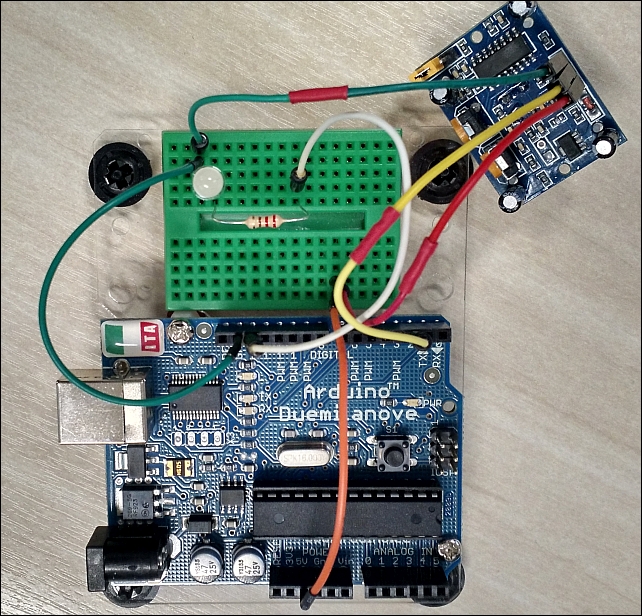
Montagem do circuito
Nos testes/experiências com este sensor, deixamos os trimpots posicionados no sentido máximo anti-horário e o jumper do modo trigger em high. A nossa sugestão é deixar inicialmente desta forma e ir ajustando conforme a sua necessidade. O LED, neste período de ajuste, terá grande importância para nos orientar quando sensor estiver em nível alto. O pino de sinal do PIR está conectado ao pino digital 2 do Arduino e o LED está conectado ao pino 13 digital do Arduino através de um resistor de 220Ω.
Exemplo
#define LED 13
#define PIR 2
void setup() {
pinMode(LED, OUTPUT);
pinMode(PIR, INPUT);
delay(5000);
}
void loop() {
byte leitura = digitalRead(PIR);
digitalWrite(LED, leitura);
}